
Chirurgie Robotique






Définition et avantages de chirurgie robotique
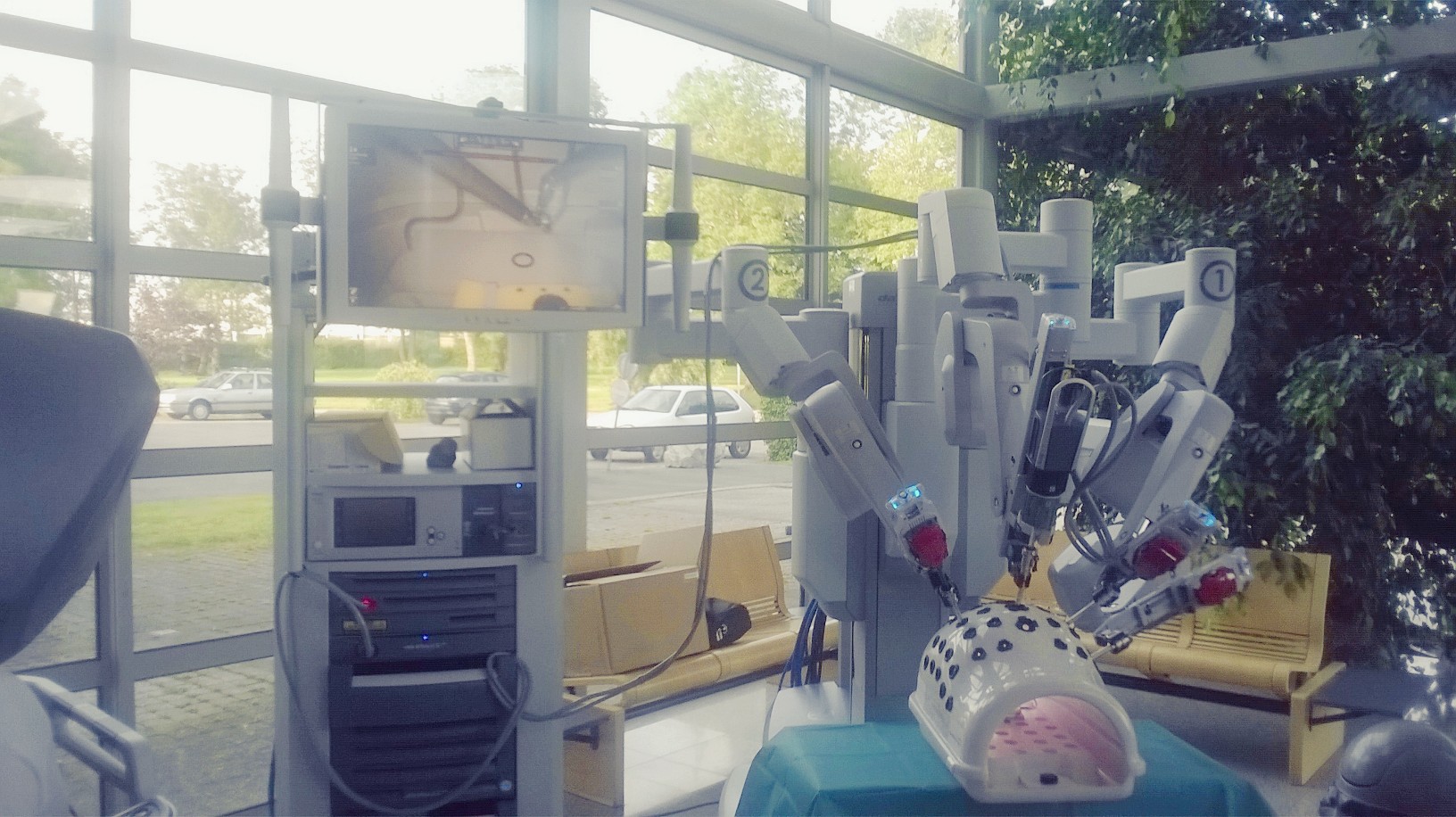
Le chirurgien opère à partir d’une console, dissociée du malade. Il commande à distance les instruments, qui sont fixés sur les bras opérateurs.
Une double caméra appelée 3D, apporte une vision en trois dimensions agrandie du champ opératoire. Il s’agit d’un progrès considérable par rapport à la vision en deux dimensions de la cœlioscopie traditionnelle, où le champ opératoire est «écrasé » sur un écran, sans restitution du relief.
Le robot est placé au-dessus du patient. Quatre bras supportent les instruments et l’optique, commandés à distance par le chirurgien dans l’abdomen du patient.
Les mouvements du chirurgien sont reproduits après élimination de tous les éléments parasites et peuvent être réalisés avec 7 degrés de liberté, à comparer aux 4 degrés de la cœlioscopie traditionnelle, permettant par exemple de réaliser des sutures dans des positions inaccessibles auparavant. Les instruments ont un degré de liberté supérieur à la main humaine (540°de rotation).
La vision en 3D, des instruments plus précis et de plus grande mobilité permettent des opérations plus complexes et repoussent les limites techniques en augmentant la sécurité et les essais cliniques (plus de 600 études cliniques en gynécologies et 400 en urologie).
Une avancée technologique pour le patient
Cette nouvelle méthode chirurgicale permet également une amélioration dans le confort de prise en charge des patients. Cette chirurgie mini invasive permet de :
- Améliorer les résultats fonctionnels rendant ainsi cette chirurgie quasiment non invalidante (notamment en ce qui concerne la prostatectomie, une meilleure récupération de la continence et des érections) ;
- Diminuer les douleurs post-opératoires ;
- Améliorer le résultat esthétique ;
- Diminuer le risque infectieux ;
- Diminuer le risque de complication pariétale ;
- Diminuer les pertes sanguines ;
- Diminuer la durée d’hospitalisation ;
- Diminuer la durée d’arrêt de travail du patient
Pour obtenir plus d’informations sur le robot chirurgical :
http://www.davincisurgery.com/french
http://www.intuitivesurgical.com/company/media/videos/broadcast/b-roll.html